Posts Tagged control
[Abstract] Modelling, design, and construction of a wrist rehabilitation exoskeleton – Full Text PDF
Posted by Kostas Pantremenos in Paretic Hand, Rehabilitation robotics on November 16, 2022
Abstract and Figures
This work presents the modelling, design, construction, and control of a wrist joint flexion/extension and abduction/adduction rehabilitation exoskeleton. The dynamic models of the wrist movements are obtained using Euler-Lagrange formulation and are built in Simulink of MATLAB in conjunction with a PID closed-loop control representing the human natural neuromusculoskeletal control. Simulations are carried out to estimate the joint torque required to produce the functional wrist movements in an average Colombian adult. The exoskeleton is designed in SolidWorks CAD software, built through 3D printing in polylactic acid (PLA), powered by two on-board servomotors, and controlled by an Arduino UNO board that establishes communication with an Android mobile app developed in MIT App Inventor for entering the rehabilitation therapy parameters. The result of this work is a lightweight exoskeleton with a total mass of 0.64 [kg] including servomotors, microcontroller, and batteries, with the ability to be used in telerehabilitation practices, guaranteeing angular displacement tracking errors under 10%. Index Terms-Arduino, control, Euler-Lagrange, MIT App Inventor, model, radiocarpal joint, rehabilitation robotics, Simulink, wearable robotics.


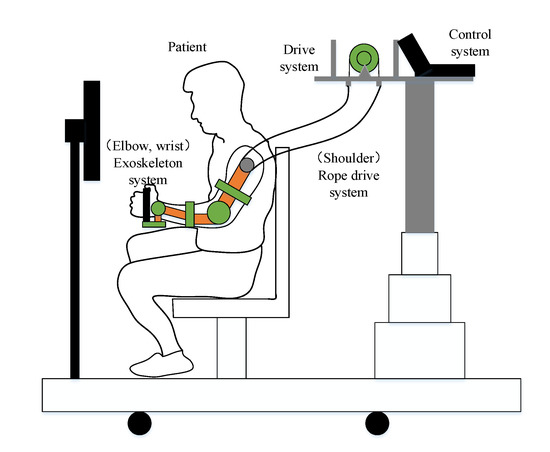
[ARTICLE] A New Design Scheme for Intelligent Upper Limb Rehabilitation Training Robot – Full Text PDF
Posted by Kostas Pantremenos in Paretic Hand, REHABILITATION, Rehabilitation robotics on April 27, 2020
Abstract: In view of the urgent need for intelligent rehabilitation equipment for some disabled people, an intelligent, upper limb rehabilitation training robot is designed by applying the theories of artificial intelligence, information, control, human-machine engineering, and more. A new robot structure is proposed that combines the use of a flexible rope with an exoskeleton. By introducing environmentally intelligent ergonomics, combined with virtual reality, multi-channel information fusion interaction technology and big-data analysis, a collaborative, efficient, and intelligent remote rehabilitation system based on a human’s natural response and other related big-data information is constructed. For the multi-degree of the freedom robot system, optimal adaptive robust control design is introduced based on Udwdia-Kalaba theory and fuzzy set theory. The new equipment will help doctors and medical institutions to optimize both rehabilitation programs and their management, so that patients are more comfortable, safer, and more active in their rehabilitation training in order to obtain better rehabilitation results.
[Abstract] Preliminary study on the design and control of a pneumatically-actuated hand rehabilitation device
Posted by Kostas Pantremenos in Paretic Hand, Rehabilitation robotics on July 15, 2017
Related Articles

