Posts Tagged daily assistance
[ARTICLE] An Overview of Artificial Intelligence-based Soft Upper Limb Exoskeleton for Rehabilitation: A Descriptive Review – Full Text PDF
Posted by Kostas Pantremenos in Artificial intelligence on January 18, 2023
Abstract: The upper limb robotic exoskeleton is an electromechanical device which
use to recover a patient’s motor dysfunction in the rehabilitation field. It can provide
repetitive, comprehensive, focused, positive, and precise training to regain the joints
and muscles’ capability. It has been shown that existing robotic exoskeletons are
generally used rigid motors and mechanical structures. Soft robotic devices can be a
correct substitute for rigid ones. Soft exosuits are flexible, portable, comfortable,
user-friendly, low-cost, and travel-friendly. Somehow, they need expertise or
therapist to assist those devices. Also, they cannot be adaptable to different patients
with non-identical physical parameters and various rehabilitation needs. For that
reason, nowadays we need intelligent exoskeletons during rehabilitation which have
to learn from patient’s previous data and act according to it with patient’s intention.
There also has a big gap between theoretical and practical applications for using
those exoskeletons. Most of the intelligent exoskeletons are prototype in manner. To
solve this problem, the robotic exoskeleton should be made both criteria as
ergonomic and portable. The exoskeletons have to the power of decision-making to
avoid the presence of expertise. In this growing field, the present trend is to make
the exoskeleton intelligent and make it more reliable to use in clinical practice.
[ARTICLE] Soft Exoskeletons: Development, Requirements, and Challenges of the Last Decade – Full Text
Posted by Kostas Pantremenos in Rehabilitation robotics on November 3, 2022
Abstract
In this article, various investigations on soft exoskeletons are presented and their functional and structural characteristics are analyzed. The present work is oriented to the studies of the last decade and covers the upper and lower joints, specifically the shoulder, elbow, wrist, hand, hip, knee, and ankle. Its functionality, applicability, and main characteristics are exposed, such as degrees of freedom, force, actuators, power transmission methods, control systems, and sensors. The purpose of this work is to show the current trend in the development of soft exoskeletons, in addition to specifying the essential characteristics that must be considered in its design and the challenges that its construction implies.
Keywords: soft exoskeleton, rehabilitation therapy,robotic enhancer,daily assistance, human–machine interface,
1. Introduction
Exoskeletons have been extensively researched and develo ped to aid the movement of various joints in the body. These devices can involve a single degree of freedom (DOF), for example, flexion and extension of the forearm, or multiple DOF, like hand movements. The complexity and physical capabilities of the exoskeleton depend on various factors, including the force/torque transmission medium, the range of motion, and the method of control.
One way to classify exoskeletons is according to their actuation devices, which can be electric, pneumatic, hydraulic, and hybrid. Electric actuators have the advantage of being fast and precise, but they are less resistant to sudden power changes. Alternatively, pneumatic and hydraulic actuators can perform various rotational changes and support heavier loads without overheating, but their power supply is weighty, complicating their portability. On the other hand, various power transmission methods have been used, for example, cables, rods, gears, elastomers, hydraulic and pneumatic hoses. The choice of these elements gives attributes to the exoskeleton that must be evaluated from the design. An incorrect configuration would negatively affect the user, not allowing continuous and prolonged use of the device.
Motor-driven metallic devices offer several advantages, including rigid and robust structures, as well as precise transmission of forces. However, these devices have certain disadvantages, such as being heavy and uncomfortable for the user. Additionally, due to their weight and complexity, most are not portable, and their installation requires trained personnel. For this reason, the development of soft robotic devices is a trend that has been increasing, and various research groups are working on their construction and innovation [1,2].
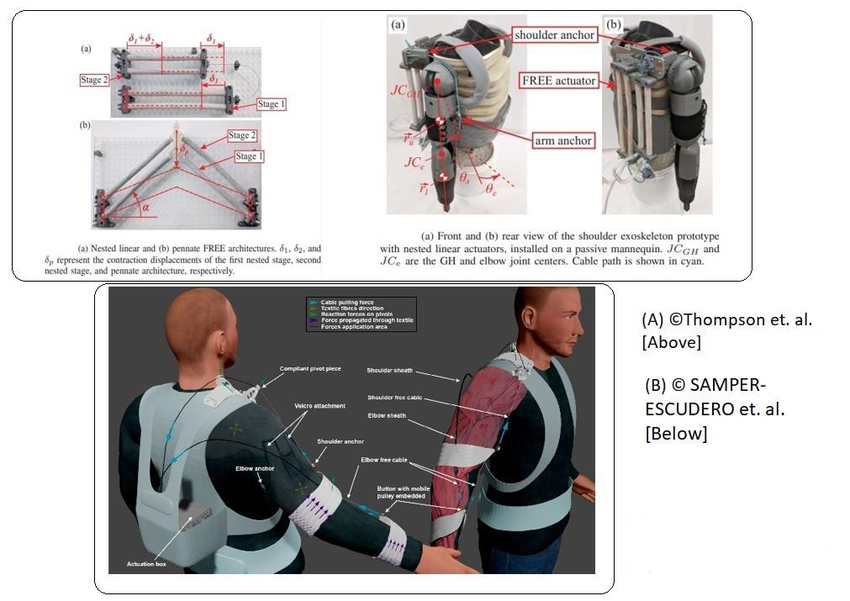
Soft exoskeletons replace many or all of the hard, big and rigid elements with soft, light, thin and flexible ones. Further, some components that must remain rigid, such as batteries and controllers, are often placed in a backpack or separately to reduce weight. These devices are lighter, more flexible, and offer greater user comfort. Additionally, due to their characteristics, they are easier to transport and install, allowing the patient to use these devices alone and in multiple locations. Soft exoskeletons have been made to aid the movement of the fingers [3,4], wrist [5,6], elbow [7,8], shoulder [9,10], hip [11,12], knee [13,14], and ankle [15,16].
In this article, we carry out an analysis of the development of soft exoskeletons focused on the last decade. The study was conducted for different areas of the body, covering the upper and lower joints. We describe the current features, applications, and trends in the development of these devices. In Section 2, the general applications used for soft exoskeletons are mentioned. Section 3 sets out the main requirements to consider when designing a soft exoskeleton, as well as the challenges to overcome to build an efficient and safe device. In Section 4, soft exoskeletons are analyzed in different works, and their main characteristics are exposed. Additionally, a general explanation of human joints is provided, mentioning its structure and the types of movements it performs. The analysis is divided into two main groups: upper and lower joints. The first group includes the shoulder, elbow, wrist, and hand. Further, the second group focuses on the hip, knee, and ankle. In Section 5, the discussion and conclusions are presented.[…]

Figure 1. Planes and axes of movement of the human body.

